Cognitron Praxis
Praxis
Differentiable Physics for Manufacturing Intelligence
Every factory is a physics problem. We make it solvable.
Cognitron Praxis
Every factory is a physics problem. We make it solvable.
Praxis connects first-principles simulation to real-time optimization and deploys it where decisions are actually made.
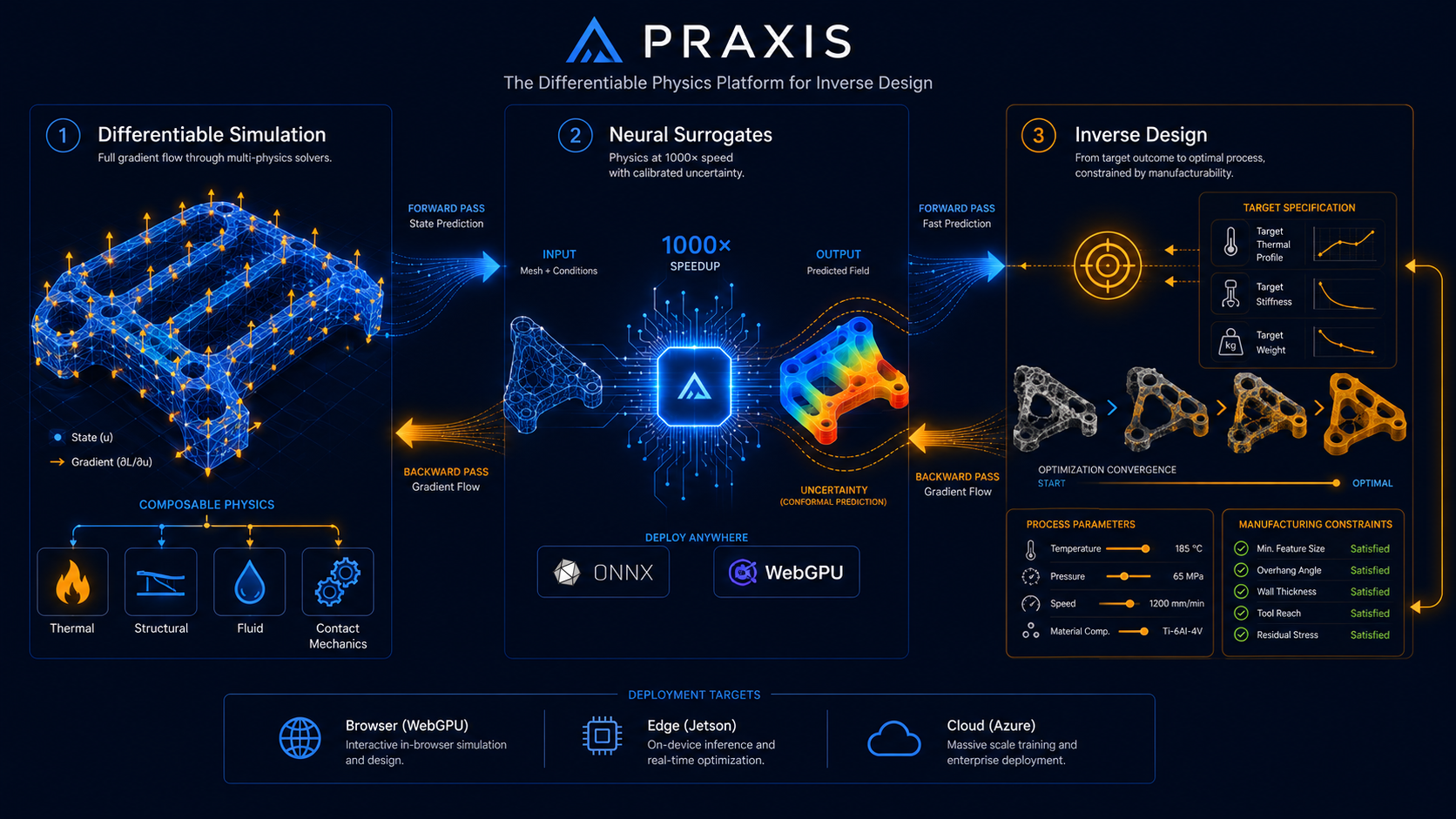
At its core, Praxis turns manufacturing from a forward problem - "run these settings and see what happens" - into an inverse problem: "tell me what settings produce this result."
Praxis wraps physics solvers - thermal, structural, fluid, and contact mechanics - in a fully differentiable computational graph, so every simulation output carries gradients back to material properties, geometry parameters, and process settings.
It builds on NVIDIA Warp and JAX-based solvers with a composable kernel architecture for chaining heterogeneous physics domains while preserving gradient flow end-to-end.
For problems where even differentiable simulation is too slow for real-time use, Praxis trains neural operator surrogates that learn the input-output mapping of the physics solver at 1000x speedup.
These surrogates carry calibrated uncertainty estimates via conformal prediction and can be exported as ONNX models for WebGPU in a browser or NVIDIA Jetson at the factory edge.
Given a target outcome - a thermal profile, structural stiffness, or defect-free weld - Praxis backpropagates through the surrogate or full solver to find the process parameters or geometry that achieve it.
Manufacturing constraints such as toolpath feasibility, material availability, and machine limits are embedded directly into the optimization loop.
Differentiable simulation, neural surrogates, and inverse design in one optimization loop.
Validated Proof Points
Praxis has been deployed for an unnamed company for automated robot path generation that adapts as shoe geometry changes.
Its computer vision pipeline also monitors SOP compliance at a Stellantis engine assembly plant.
Where Praxis Is Going
Engineers will upload a CAD geometry or define a process, Praxis will run the physics, train a surrogate, and deliver an optimized design or recipe.
The first public-facing demo is an EV battery cold-plate topology optimizer running entirely in the browser via WebGPU-accelerated neural surrogates.
Coming Soon.
Our Praxis product demo is in production and will be available here soon.